3D-Bestandsaufnahme mittels Laserscan
3D-Bestandsaufnahme mittels Laserscan an der 3-Fach-Sporthalle Gesamtschule Emschertal in Neumühl
Einführung
Im Rahmen der Zusammenarbeit zwischen dem Immobilien-Management Duisburg und dem Amt für Bodenordnung, Geomanagement und Kataster werden 3D-Bestandsaufnahmen von städtischen Gebäuden aufgenommen und dienen als Datengrundlage für Baumaßnahmen sowie die zukünftige Bewirtschaftung der Gebäude.
Zum besseren Verständnis der Lehrinhalte im Ausbildungsberuf Bauzeichner*in haben wir, die Auszubildenden des IMDs, eine solche 3D-Bestandsaufnahme der „3-Fach Sporthalle Albert-Einstein-Str. 11“, begleitet.
Die Bestandsaufnahme der Räumlichkeiten erfolgte vor Ort mittels eines 3D-Laserscanners. Im Außenbereich wirkte eine Drohne unterstützend für die Aufnahme der Dachflächen.
Laserscan
Die Bestandsaufnahme erfolgte während der Osterferien 2022, da die Sporthalle ansonsten für den Schulunterricht und das Vereinstraining in Nutzung ist. Es wird immer versucht den Tagesbetrieb durch die Bestandsaufnahmen nicht einzuschränken. Bevor wir zu dem Vermessungsteam stießen, traf dieses bereits vorbereitende Maßnahmen. Hierzu gehörte das Einmessen der Vermessungsfestpunkte mittels Tachymeter, wodurch der späteren Punktwolke ihre genauen Koordinaten zugeordnet werden können.
Außerdem entstand im Vorfeld bereits der sogenannte Masterscan, der erste festgelegte Scanvorgang. Das Team vermittelte uns seine bisherigen Arbeitsschritte und knüpfte mit uns am Scanvorgang der Innenräume an.
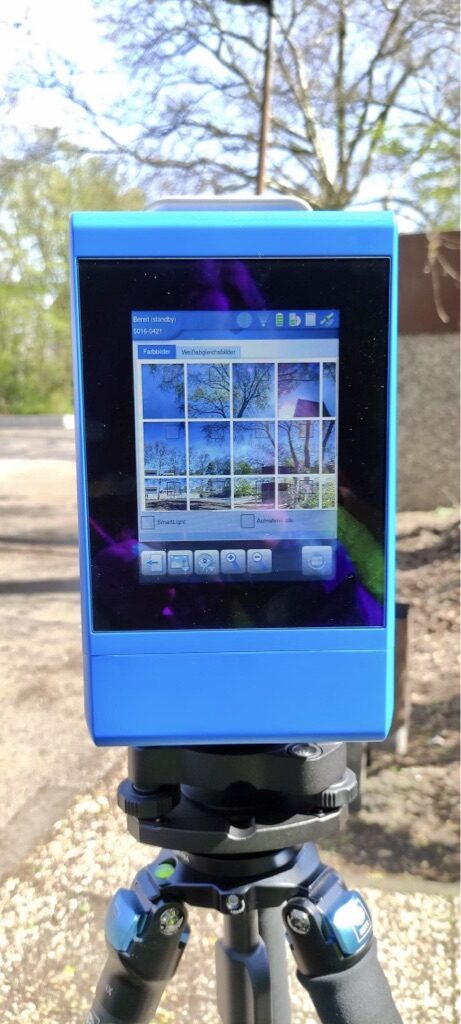
Der 3D Laserscan benötigt je nach Einstellung, eine Minute und 30 Sekunden für das Entsenden von Sinuswellen, welche die lokale Lage einzelner Punkte übermitteln. Daraufhin erfolgt die Aufnahme von Farbfotos der Räumlichkeiten innerhalb von 2 Minuten, um den aufgenommenen Punkten Farbinformationen zuzuordnen.
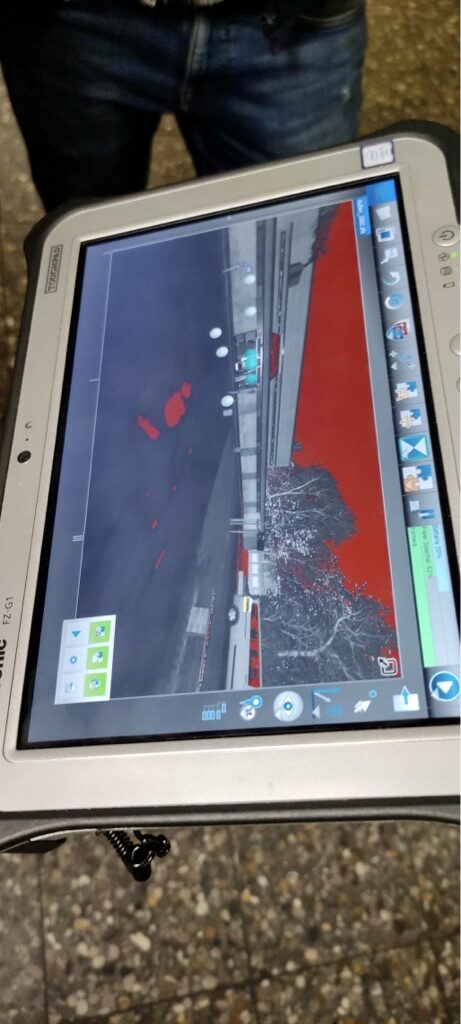
Es sollte stets darauf geachtet werden, während dieser Vorgänge nicht im Sichtfeld des Scanners zu stehen. Passiert es dennoch, können die Aufnahmen im Nachhinein kontrolliert und ersetzt werden. Die Genauigkeitsstufe der Punktdichte ist für jeden Scan individuell einstellbar. In diesem Fall lag die Einstellung auf 1 Punkt je 6mm Fläche bei einer Entfernung von 10 Metern. Der Scanner verknüpft die einzelnen Scanvorgänge anhand der bekannten Flächen miteinander.
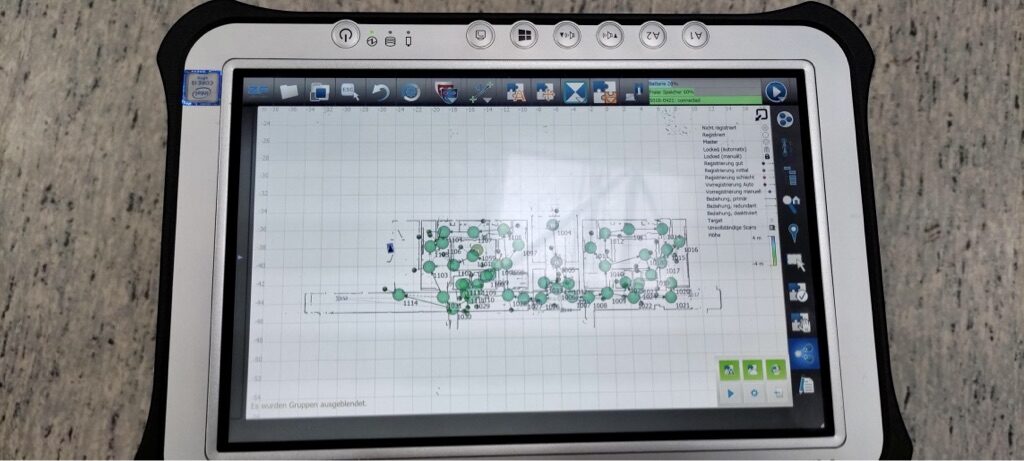
Aufgrund dieser Arbeitsweise muss bei der Auswahl der Standorte immer eine leichte Überlappung der Aufnahmen gewährleistet werden. Bedient wird das Gerät sowohl mit einem integriertem Touchbildschirm als auch einem externen Tablet mit spezifischer Software. Eine händische Eingliederung der Scanstandorte und Überprüfung ist daher jederzeit möglich. Die Datensicherung erfolgt vorerst auf den Geräten, wobei sowohl der Scanner als auch das Tablet eine Version zwischenspeichert. Der Scanvorgang kann jederzeit pausiert und zu späterem Zeitpunkt wieder aufgenommen werden. Der abgeschlossene Datensatz wird dann später von den Geräten exportiert und zur weiteren Verarbeitung freigegeben.
Drohne
Die Befliegung des Gebäudes erfolgte im Luftraum mittels einer Drohne. Voraussetzung hierfür ist eine abgeschlossene Schulung mit Nachweis einer Flugbescheinigung zur Handhabung der Drohne. Vorbereitend legten wir sogenannte „Targets“ um das Gebäude herum ab und maßen diese mit einem GPS-Empfänger, zur genauen Bestimmung des Standortes aus. Dieser Vorgang dient der Überprüfung und Genauigkeitssteigerung der späteren Daten aus dem Drohnenflug.
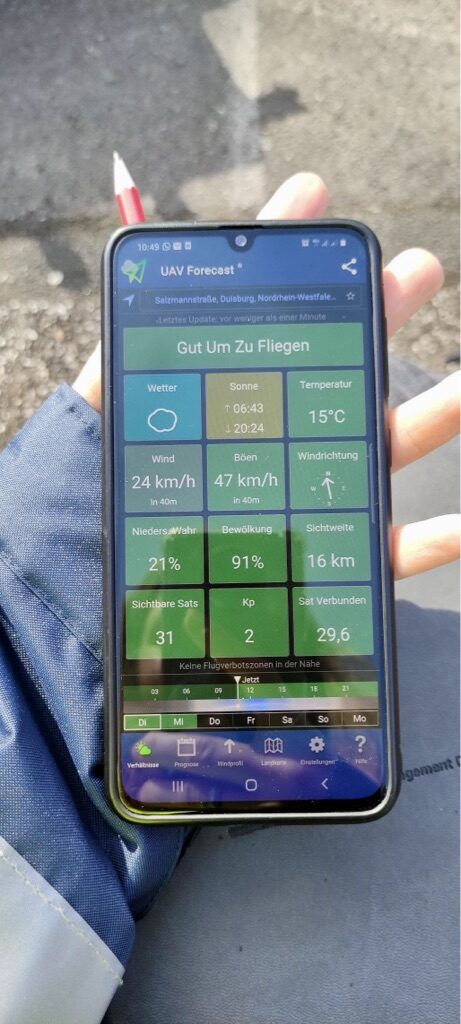
Die Drohne ist mit zwei GPS-Antennen ausgestattet. Bevor es jedoch zum Fliegen kommt, wird via App die Wetterlage kontrolliert. Diese zeigt z.B. die Windgeschwindigkeit an und bewertet das örtliche Wetter. Zeigt diese also an, dass ein Drohnenflug möglich ist, darf gestartet werden. Das erste Mal in der Luft, wird auf die umliegenden Bäume und Gebäude geachtet und deren ungefähre Höhe abgemessen. Der Flugplan kann via Touchbildschirm an der Kontrollstation abgesteckt werden und erhält zusätzliche Informationen; wie z.B. die Flughöhe. Ist die Flugroute freigegeben, startet die Drohne und fliegt das vorgegebene Gelände in mehreren Bahnen ab. Je nach vorheriger Einstellung, bleibt die Drohne nach Beendigung in der Luft oder kommt vollautomatisch zu ihrem Startpunkt zurück. Während des Fluges sind die Luftaufnahmen auf der Kontrollstation sichtbar.
Außerdem kann zu jedem Zeitpunkt manuell in die Flugroute eingegriffen werden. Die einzelnen Bildaufnahmen müssen zu 70 % seitlich und zu 80 % längs Überlappen, damit diese zusammengefügt werden können. Außerdem ist ein zweiter Flug in unterschiedlicher Höhe und Flugausrichtung für einen vollständigen Datensatz notwendig. Im Fall der 3-Fach-Sporthalle erfasste die Drohne 10:460 m² mit einer Fluglänge von ca. 1 km innerhalb von 24 Minuten. Die Akkukapazität beträgt je nach Windgeschwindigkeit und Flughöhe etwa 30 Minuten und reichte somit ohne Wechsel aus. Die Erreichbarkeit der Drohne via Kontrollstation liegt in etwa bei 8 km, wird in der Regel allerdings nicht ausgenutzt, da nur „auf Sicht“ geflogen wird.